
ข่าว

โครงสร้าง ส่วนประกอบ และหลักการทำงานของไดรฟ์แกว่งแนวนอนคืออะไร?
 2026.04.27
2026.04.27
 ข่าวอุตสาหกรรม
ข่าวอุตสาหกรรม
ไดรฟ์แกว่งแนวนอน คือชุดตัวกระตุ้นแบบหมุนที่มีความแม่นยำซึ่งรวมเอาแบริ่งวงแหวนแกว่ง ระยะลดเฟืองตัวหนอน และตัวเรือนไดรฟ์เข้าไว้ในหน่วยเดียวที่สามารถรองรับ หมุน และรองรับน้ำหนักในระนาบแนวนอนได้ ซึ่งแตกต่างจากกระปุกเกียร์โรตารีทั่วไปที่ส่งแรงบิดไปตามแกนคงที่ ตัวขับแบบแกว่งจะจัดการโหลดในแนวรัศมี โหลดตามแนวแกน และโมเมนต์การพลิกคว่ำไปพร้อมๆ กัน ในขณะที่ให้การหมุนที่มีการควบคุม ทำให้เป็นโซลูชันการขับเคลื่อนที่ต้องการสำหรับการใช้งาน เช่น เครื่องติดตามแสงอาทิตย์ เครนก่อสร้าง แท่นทำงานทางอากาศ หุ่นยนต์อุตสาหกรรม เสาอากาศดาวเทียม และเครื่องเล่นแผ่นเสียงสำหรับงานหนัก การทำความเข้าใจวิธีสร้างไดรฟ์แกว่งแนวนอนและวิธีการทำงานของไดรฟ์ในระดับกลไกถือเป็นสิ่งสำคัญสำหรับวิศวกรที่ระบุระบบไดรฟ์ เจ้าหน้าที่ซ่อมบำรุงที่ให้บริการอุปกรณ์ที่ติดตั้ง และทีมจัดซื้อที่ประเมินทางเลือกของซัพพลายเออร์
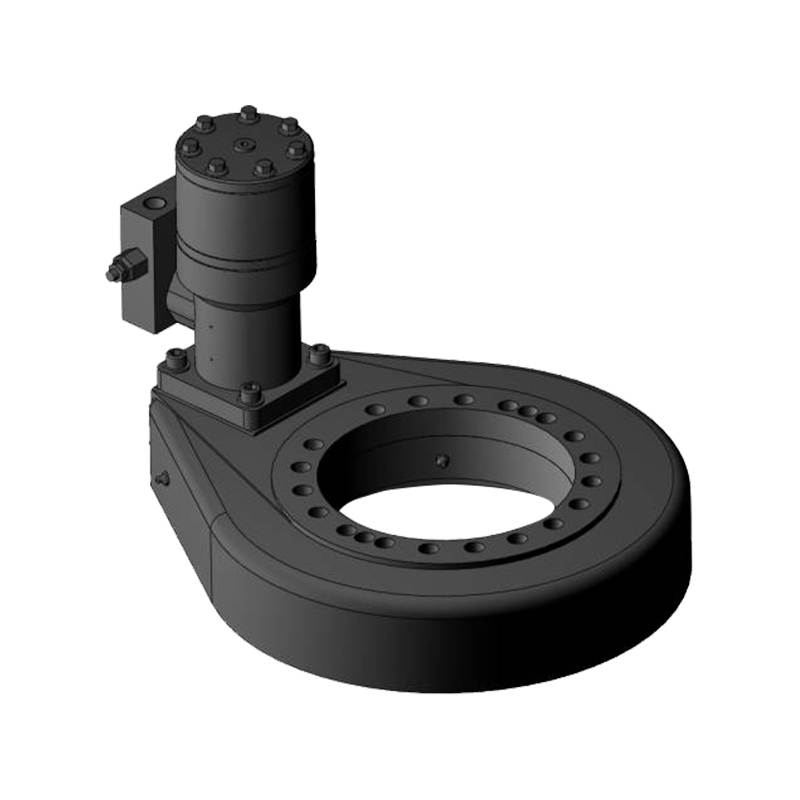
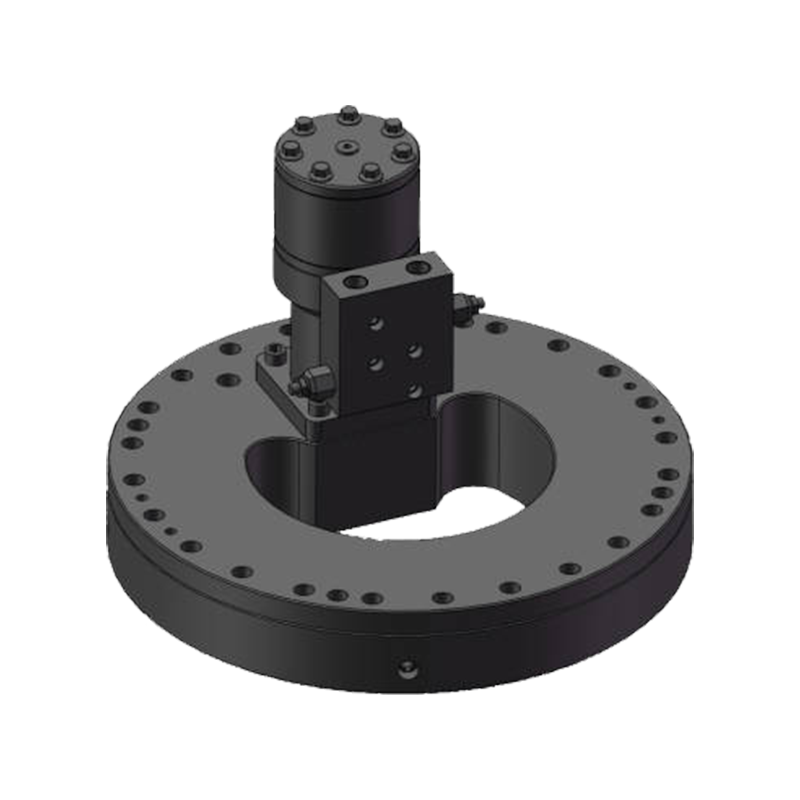
โครงสร้างโดยรวมของไดรฟ์แกว่งแนวนอน
ตัวขับแกว่งแนวนอนเป็นชุดประกอบแบบครบวงจรที่รวมฟังก์ชันการรองรับแบริ่ง การลดเกียร์ และตัวขับเคลื่อนแบบหมุนไว้ในตัวเครื่องขนาดกะทัดรัดตัวเดียว ในการกำหนดค่าแนวนอน แกนของวงแหวนแกว่งหลักจะวางในแนวตั้ง กล่าวคือ โต๊ะเอาต์พุตที่หมุนหรือหน้าแปลนจะหมุนรอบแกนแนวตั้งในระนาบแนวนอน ซึ่งเป็นการวางแนวตามธรรมชาติสำหรับแท่นหมุน เครื่องติดตามแนวราบแสงอาทิตย์ และระบบแกว่งเครนที่น้ำหนักบรรทุกจะหมุนในแนวนอนรอบศูนย์กลางแนวตั้ง
ตัวเรือนด้านนอกของตัวขับเคลื่อนแบบแกว่งนั้นตัดเฉือนจากเหล็กหล่อหรือเหล็กดัด และทำหน้าที่เป็นทั้งเปลือกโครงสร้างของกระปุกเกียร์และส่วนต่อประสานการติดตั้งกับโครงสร้างฐานที่อยู่นิ่ง ตัวเรือนให้ความแข็งแกร่งเพื่อต้านทานโมเมนต์การโค้งงอที่สำคัญที่เกิดขึ้นเมื่อโหลดที่ไม่อยู่ตรงกลางถูกนำไปใช้กับเอาท์พุตที่กำลังหมุน และจะล้อมรอบตาข่ายเฟืองในสภาพแวดล้อมที่มีการหล่อลื่นและปิดผนึก รูยึดบนผิวหน้าตัวเรือนและฐานช่วยให้สามารถเชื่อมต่อแบบสลักเกลียวเข้ากับโครงเครื่องจักรที่เส้นผ่านศูนย์กลางวงกลมโบลต์ที่ได้มาตรฐาน และหน้าแปลนเอาต์พุตหรือวงแหวนให้ส่วนต่อประสานแบบโบลต์กับภาระการหมุนด้านบน
พื้นที่โดยรวมของชุดประกอบมีขนาดกะทัดรัดเมื่อเทียบกับโหลดที่จัดการ ไดรฟ์แกว่งแนวนอนช่วงกลางที่วัดได้ประมาณ เส้นผ่านศูนย์กลาง 300 มม โดยทั่วไปสามารถรองรับโหลดตามแนวแกนที่เกิน 50 กิโลนิวตัน, โหลดในแนวรัศมีที่สูงกว่า 30 กิโลนิวตัน และโมเมนต์การพลิกคว่ำที่สูงกว่า 15 กิโลนิวตันเมตร ในขณะที่ให้แรงบิดเอาท์พุตในช่วง 5,000 ถึง 20,000 น.ม ขึ้นอยู่กับอินพุตของมอเตอร์และการเลือกอัตราทดเกียร์ ความหนาแน่นของกำลังที่สัมพันธ์กับขนาดซองจดหมายเป็นหนึ่งในข้อได้เปรียบทางวิศวกรรมหลักที่ขับเคลื่อนการนำรูปแบบการขับเคลื่อนแบบแกว่งแบบบูรณาการมาใช้แทนโซลูชันตลับลูกปืนและกระปุกเกียร์ที่ประกอบแยกกัน
ส่วนประกอบหลักและหน้าที่ของมัน
ตัวขับแกว่งแนวนอนทุกตัวถูกสร้างขึ้นรอบๆ ชุดส่วนประกอบทางกลหลักที่ทำงานร่วมกันเพื่อส่งการหมุนอินพุตจากมอเตอร์ไปยังการหมุนเอาท์พุตแรงบิดสูงที่มีการควบคุมของวงแหวนแกว่ง แต่ละส่วนประกอบทำหน้าที่เฉพาะและไม่สามารถถูกแทนที่ได้ในเส้นทางโหลด
แบริ่งแหวนแกว่ง
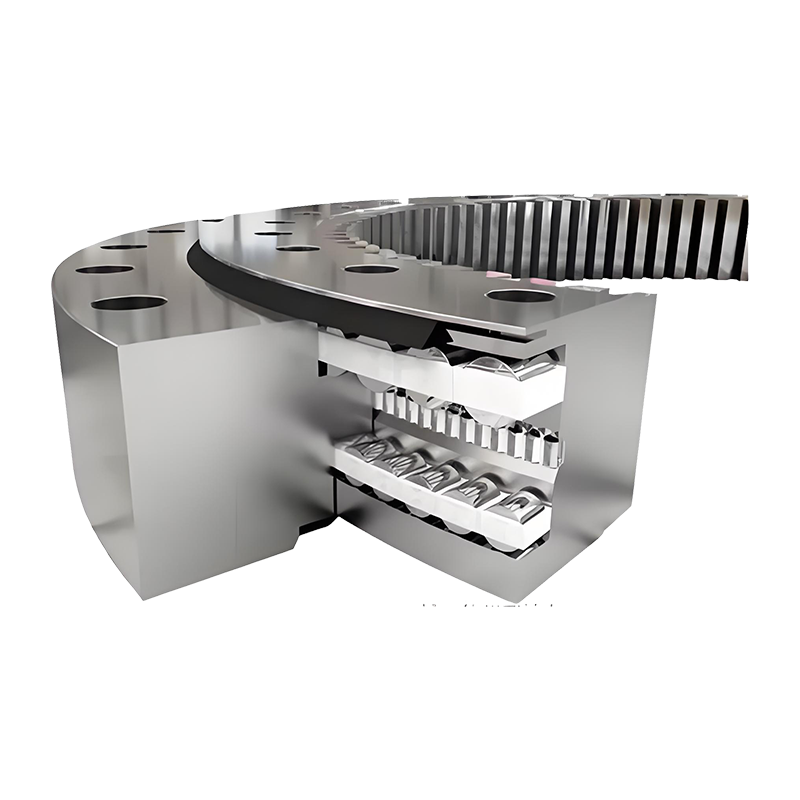
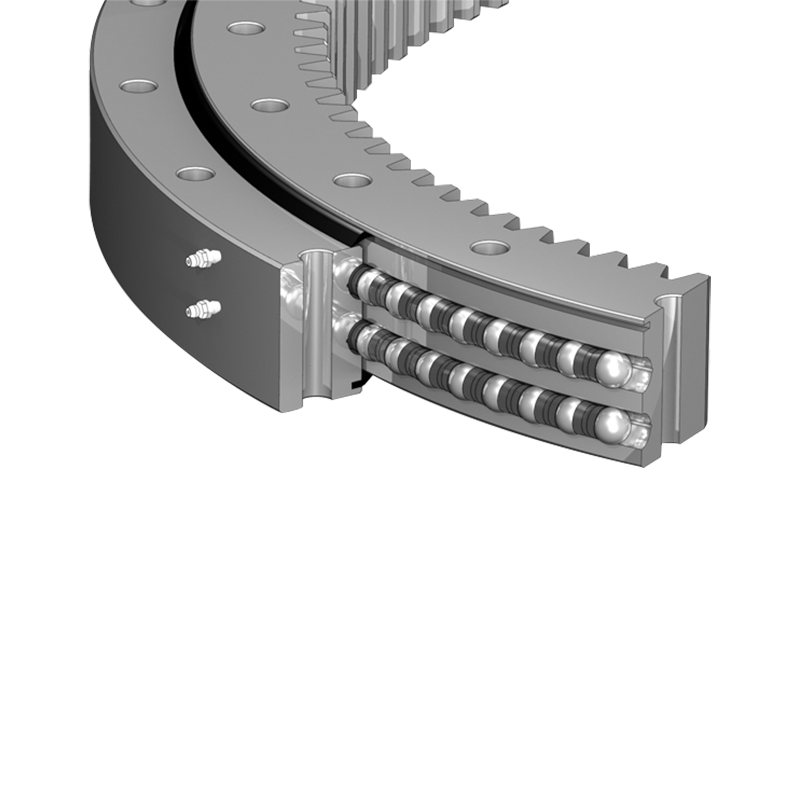
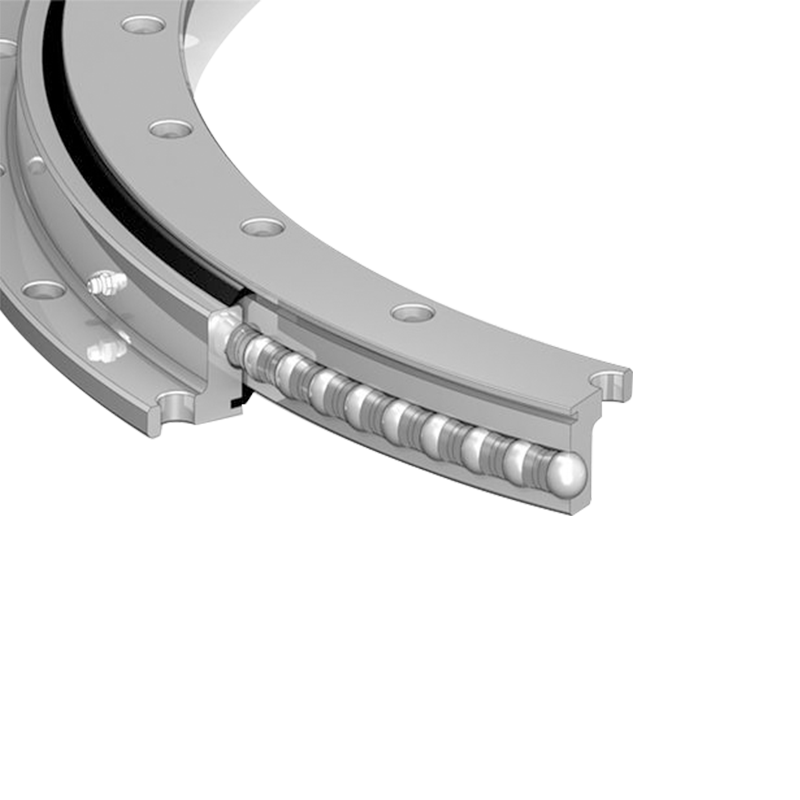
แหวนแกว่งเป็นส่วนประกอบโครงสร้างส่วนกลางของชุดประกอบ เป็นตลับลูกปืนเม็ดกลมที่มีเส้นผ่านศูนย์กลางขนาดใหญ่พร้อมเฟืองในตัว ซึ่งโดยทั่วไปจะเป็นเฟืองวงแหวนล้อหนอน ซึ่งกลึงเข้าในวงแหวนด้านในหรือวงแหวนรอบนอก ในระบบขับเคลื่อนแบบแกว่งแนวนอน โดยทั่วไปเฟืองจะถูกกลึงที่พื้นผิวด้านในของวงแหวนรอบนอกหรือพื้นผิวด้านนอกของวงแหวนด้านใน ขึ้นอยู่กับการออกแบบเฉพาะ องค์ประกอบที่กลิ้งระหว่างวงแหวนด้านในและด้านนอกจะรับภาระที่ใช้ทั้งหมด — แรงตามแนวแกนจากน้ำหนักของน้ำหนักบรรทุก แรงในแนวรัศมีจากการโหลดในแนวนอน และโมเมนต์การพลิกคว่ำจากโหลดเยื้องศูนย์ — ในขณะที่ปล่อยให้วงแหวนหมุนโดยสัมพันธ์กันโดยมีแรงเสียดทานน้อยที่สุด
วงแหวนแกว่งในไดรฟ์แนวนอนมักใช้กันมากที่สุด ตลับลูกปืนเม็ดกลมสัมผัสสี่จุดแถวเดียว หรือ แบริ่งลูกกลิ้งข้าม . ตลับลูกปืนเม็ดกลมสัมผัสสี่จุดใช้โปรไฟล์ร่องน้ำแบบโค้งแบบโกธิกที่ช่วยให้ลูกบอลแต่ละเม็ดสัมผัสกับร่องน้ำที่สี่จุดพร้อมกัน ทำให้ลูกบอลแถวเดียวสามารถรับแรงตามแนวแกนจากทั้งสองทิศทาง โหลดในแนวรัศมี และโมเมนต์การพลิกคว่ำ แบริ่งลูกกลิ้งแบบไขว้จะสลับลูกกลิ้งทรงกระบอกที่การวางแนว 90 องศาในแถวเดียว ทำให้มีความแข็งและความสามารถในการรับโมเมนต์สูงมากในหน้าตัดบาง ทั้งสองประเภทใช้ในการขับเคลื่อนการแกว่งแนวนอน โดยมีการออกแบบลูกกลิ้งแบบไขว้ซึ่งนิยมใช้เมื่อต้องการความแข็งแกร่งและความแม่นยำสูงสุด และการออกแบบลูกบอลสัมผัสสี่จุดได้รับการสนับสนุนในเรื่องความคุ้มค่าในการใช้งานที่หนักกว่าแต่ต้องการความแม่นยำน้อยกว่า
ชุดเฟืองตัวหนอน
ขั้นตอนการลดเฟืองตัวหนอนเป็นกลไกที่ใช้คูณแรงบิดของมอเตอร์ และความเร็วอินพุตจะลดลงเหลือการหมุนเอาท์พุตแรงบิดสูงที่ความเร็วต่ำซึ่งจำเป็นต่อการใช้งาน เพลาตัวหนอน - เพลาเกลียวแบบเกลียวที่ขับเคลื่อนโดยตรงโดยมอเตอร์อินพุต - ประกบกับฟันเฟืองวงแหวนบนวงแหวนแกว่ง ซึ่งทำหน้าที่เป็นล้อตัวหนอนในคู่เฟือง ในขณะที่เพลาตัวหนอนหมุน มุมเกลียวของเกลียวตัวหนอนจะสร้างแรงในวงสัมผัสบนฟันเฟืองวงแหวน โดยผลักพวกมันและวงแหวนแกว่งรอบแกนหมุน
อัตราทดเฟืองตัวหนอนในไดรฟ์แกว่งโดยทั่วไปมีตั้งแต่ 20:1 ถึง 100:1 หรือสูงกว่า ภายในขั้นตอนการลดความเร็วเพียงครั้งเดียว ให้แรงบิดทวีคูณอย่างมากจากแพ็คเกจมอเตอร์อินพุตขนาดกะทัดรัด โดยทั่วไปเพลาตัวหนอนผลิตจากเหล็กอัลลอยด์ชุบแข็งและมีลักษณะเกลียวกราวด์เพื่อให้สัมผัสฟันได้อย่างแม่นยำและลดฟันเฟืองให้เหลือน้อยที่สุด โดยทั่วไป ฟันเฟืองวงแหวนจะถูกตัดจากเหล็กกล้าคาร์บอนปานกลางที่ผ่านการชุบแข็ง หรือจากโลหะผสมทองแดงในการออกแบบระดับพรีเมียม ซึ่งให้ลักษณะการเสียดสีที่ดีต่อตัวหนอนเหล็ก และลดการสึกหรอของส่วนประกอบทั้งสอง
ตลับลูกปืนและตัวเรือนเพลาตัวหนอน
เพลาตัวหนอนได้รับการรองรับที่ปลายทั้งสองข้างภายในตัวเรือนโดยแบริ่งองค์ประกอบแบบกลิ้ง - โดยทั่วไปแล้วเป็นแบริ่งลูกกลิ้งเรียวหรือตลับลูกปืนเม็ดกลมสัมผัสเชิงมุม - ซึ่งรับภาระในแนวรัศมีที่เกิดจากตาข่ายเฟืองตัวหนอนถึงวงแหวนและแรงขับตามแนวแกนที่สร้างโดยมุมเกลียวของเกลียวตัวหนอน โหลดล่วงหน้าที่เหมาะสมบนแบริ่งเพลาเหล่านี้เป็นสิ่งสำคัญสำหรับการรักษาหน้าสัมผัสของเฟืองตัวหนอนถึงวงแหวนที่สอดคล้องกันตลอดช่วงโหลดเต็มของไดรฟ์ พรีโหลดที่ไม่เพียงพอจะทำให้เพลาตัวหนอนเบี่ยงเบนไปภายใต้น้ำหนักบรรทุก เพิ่มระยะฟันเฟืองและเร่งการสึกหรอของฟัน โหลดล่วงหน้าที่มากเกินไปจะเพิ่มแรงเสียดทานของแบริ่งและการสร้างความร้อน ลดประสิทธิภาพเชิงกลและลดอายุการใช้งานของแบริ่ง
ระบบซีล
การปิดผนึกที่มีประสิทธิภาพเป็นสิ่งสำคัญต่ออายุการใช้งานของไดรฟ์ที่ยืดเยื้อ โดยเฉพาะอย่างยิ่งในการใช้งานกลางแจ้ง เช่น เครื่องติดตามแสงอาทิตย์และเครนเคลื่อนที่ ซึ่งส่วนประกอบต้องเผชิญกับฝน ฝุ่น การหมุนเวียนของอุณหภูมิ และรังสียูวี ตัวขับแกว่งแนวนอนใช้การผสมผสานระหว่างซีลเขาวงกต ซีลปาก และซีลหน้าโอริงที่ส่วนต่อประสานระหว่างวงแหวนหมุนกับตัวเรือนที่อยู่กับที่ และที่จุดทางเข้าเพลาหนอนเข้าไปในตัวเรือน โดยทั่วไปช่ององค์ประกอบการหมุนของแหวนแกว่งจะถูกปิดผนึกด้วยซีลยางที่ยึดติดกับวงแหวนแบริ่ง เพื่อป้องกันการสูญเสียน้ำมันหล่อลื่นและการปนเปื้อนที่ทางเข้าของแบริ่งหลัก
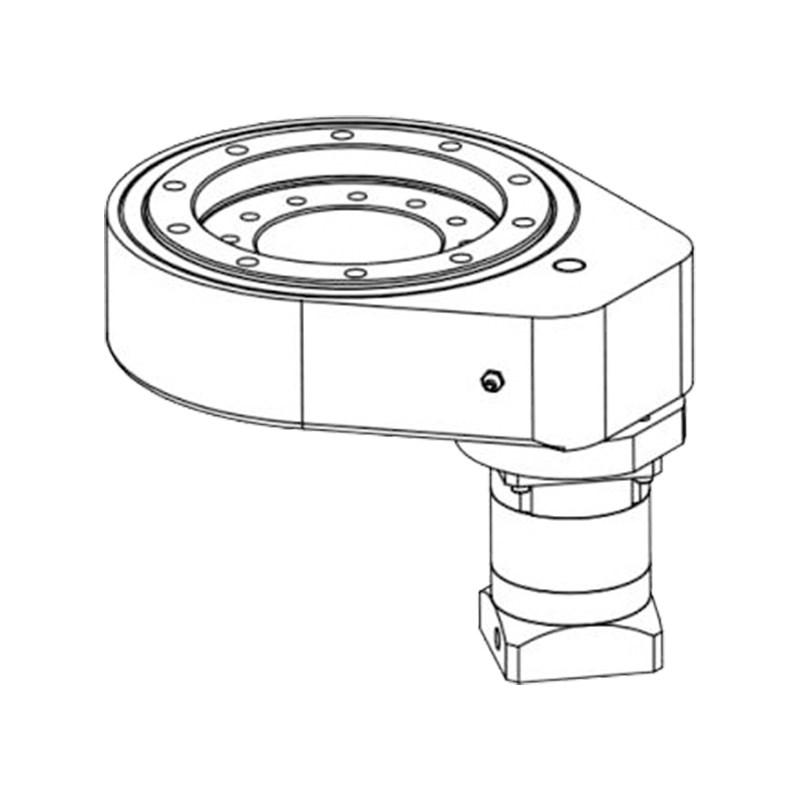
หลักการทำงาน: วิธีสร้างการหมุนและแรงบิด
ลำดับการทำงานของระบบขับเคลื่อนแกว่งแนวนอนเริ่มต้นที่มอเตอร์ ไม่ว่าจะเป็นมอเตอร์ไฟฟ้าที่มีระยะอินพุตของกระปุกเกียร์ดาวเคราะห์ มอเตอร์ไฮดรอลิก หรือในบางการออกแบบเซอร์โวมอเตอร์ขับเคลื่อนโดยตรง ซึ่งติดตั้งอยู่กับหน้าแปลนอินพุตเพลาหนอนของตัวเรือน เมื่อเพลามอเตอร์หมุน มันจะหมุนเพลาหนอนตามความเร็วอินพุต เกลียวเกลียวของเพลาตัวหนอนอยู่ในตาข่ายต่อเนื่องกับฟันเฟืองวงแหวนของวงแหวนด้านในหรือด้านนอกของวงแหวนแกว่ง
รูปทรงของตาข่ายเฟืองตัวหนอนต่อวงแหวนจะแปลงการเคลื่อนที่แบบหมุนเร็วของเพลาตัวหนอนเป็นการหมุนด้วยแรงบิดสูงอย่างช้าๆ ของวงแหวนแกว่งผ่านข้อได้เปรียบทางกลที่กำหนดโดยอัตราทดเกียร์ หากเพลาตัวหนอนหมุนครบหนึ่งรอบ วงแหวนแกว่งจะก้าวหน้าตามจำนวนฟันเฟืองของวงแหวนเท่ากับจำนวนเกลียวที่เริ่มต้นบนตัวหนอน หนอนที่สตาร์ทครั้งเดียวที่ขับเคลื่อนเฟืองวงแหวน 60 ฟันจะสร้าง อัตราทดเกียร์ 60:1 — การหมุนรอบหนอน 60 รอบจะทำให้วงแหวนหมุนครบหนึ่งรอบ
แรงในวงสัมผัสที่ใช้กับฟันเฟืองวงแหวนโดยเกลียวตัวหนอนเป็นผลคูณของแรงบิดอินพุตคูณด้วยอัตราทดเกียร์และประสิทธิภาพเชิงกลของตาข่ายตัวหนอน เฟืองตัวหนอนมีประสิทธิภาพทางกลไกน้อยกว่าเฟืองเกลียวแกนขนาน เนื่องจากการเลื่อนหน้าสัมผัสระหว่างฟันหนอนและฟันล้อมากกว่าหน้าสัมผัสการหมุนของคู่เฟืองเกลียว ค่าประสิทธิภาพสำหรับไดรฟ์แกว่งที่ขับเคลื่อนด้วยหนอนมักจะตกอยู่ใน ช่วง 50% ถึง 80% ขึ้นอยู่กับมุมนำของตัวหนอน สภาพการหล่อลื่น และวัสดุที่ใช้ มุมลีดที่สูงขึ้น (เวิร์มสตาร์ทหลายตัว) ปรับปรุงประสิทธิภาพแต่ลดอัตราทดเกียร์ต่อสเตจ มุมนำที่ต่ำกว่าช่วยปรับปรุงอัตราทดเกียร์ แต่ลดประสิทธิภาพและเพิ่มการสร้างความร้อนที่ความเร็วอินพุตสูง
พฤติกรรมการล็อคตัวเอง
ลักษณะการทำงานที่สำคัญที่สุดประการหนึ่งของไดรฟ์แกว่งแนวนอนที่ขับเคลื่อนด้วยหนอนคือความสามารถในการล็อคตัวเองโดยธรรมชาติ เมื่อมุมลีดของหนอนต่ำกว่าค่าเกณฑ์ — โดยทั่วไปจะต่ำกว่าประมาณ 6 ถึง 8 องศา แม้ว่าค่าที่แน่นอนจะขึ้นอยู่กับค่าสัมประสิทธิ์การเสียดสี แต่รูปทรงตาข่ายเฟืองจะป้องกันไม่ให้เฟืองวงแหวนขับกลับเพลาหนอน ซึ่งหมายความว่าเมื่อถอดกำลังมอเตอร์ออก ตัวขับเคลื่อนแบบแกว่งจะคงตำแหน่งไว้ภายใต้ภาระ โดยไม่ต้องใช้ระบบเบรกแยกต่างหาก แรงปฏิกิริยาจากภาระบนฟันเฟืองของวงแหวนจะสร้างส่วนประกอบของแรงตามแกนเพลาตัวหนอน แต่แรงเสียดทานในการสัมผัสระหว่างตัวหนอนกับล้อจะป้องกันแรงนี้จากการเอาชนะแรงเสียดทานสถิตและผลักดันให้ตัวหนอนหมุน
การล็อคตัวเองเป็นคุณสมบัติด้านความปลอดภัยที่สำคัญในการใช้งาน เช่น เครื่องติดตามแสงอาทิตย์ แท่นทำงานทางอากาศ และอุปกรณ์ขนถ่ายวัสดุ ซึ่งตัวขับเคลื่อนจะต้องรักษาตำแหน่งคงที่ภายใต้โหลดที่ใช้ระหว่างไฟฟ้าขัดข้องหรือระบบควบคุมขัดข้อง ช่วยลดความจำเป็นในการเบรกค้างภายนอกในการใช้งานหลายประเภท ทำให้การออกแบบระบบง่ายขึ้นและลดจำนวนส่วนประกอบ อย่างไรก็ตาม ไดรฟ์แกว่งแบบล็อคตัวเองไม่สามารถขับเคลื่อนกลับได้สำหรับการจัดตำแหน่งฉุกเฉินแบบแมนนวล ซึ่งจะต้องคำนึงถึงในการวางแผนความปลอดภัยของเครื่องจักร

พารามิเตอร์ความสามารถในการรับน้ำหนักและข้อกำหนดการเลือก
การเลือกไดรฟ์แกว่งแนวนอนที่ถูกต้องสำหรับการใช้งานที่กำหนดจำเป็นต้องประเมินพารามิเตอร์โหลดหลักสี่พารามิเตอร์พร้อมกัน เนื่องจากแบริ่งแหวนแกว่งจะต้องรองรับโหลดที่ใช้ทั้งหมดพร้อมกันตลอดอายุการใช้งาน
| โหลดพารามิเตอร์ | คำนิยาม | ส่วนประกอบการพกพาหลัก | หน่วยทั่วไป |
|---|---|---|---|
| โหลดตามแนวแกน | แรงขนานกับแกนหมุน (แนวตั้งในไดรฟ์แนวนอน) | องค์ประกอบการกลิ้งแหวนแกว่ง | kN |
| โหลดเรเดียล | แรงตั้งฉากกับแกนหมุน (แนวนอน) | องค์ประกอบการกลิ้งแหวนแกว่ง | kN |
| พลิกคว่ำช่วงเวลา | โมเมนต์การดัดงอจากโหลดประหลาดหรือแรงด้านข้าง | คู่แบริ่งแหวนแกว่ง | kN·m |
| แรงบิดเอาท์พุต | แรงบิดขับเคลื่อนแบบหมุนที่ส่งไปยังโหลด | เฟืองตัวหนอนและเฟืองวงแหวน | N·m |
ลักษณะสำคัญของการเลือกไดรฟ์แบบแกว่งคือพารามิเตอร์ทั้งสี่นี้มีปฏิสัมพันธ์กัน - ไดรฟ์ที่ทำงานใกล้กับความจุโมเมนต์การพลิกคว่ำที่กำหนดได้ลดความสามารถในการรับน้ำหนักตามแนวแกนและแนวรัศมีที่มีอยู่ และในทางกลับกัน ตารางคะแนนของผู้ผลิตระบุซองความจุรวม และการเลือกที่เหมาะสมจำเป็นต้องวางแผนการรวมโหลดที่ใช้จริงกับซองเหล่านี้ แทนที่จะเปรียบเทียบพารามิเตอร์แต่ละตัวแยกกัน
ข้อกำหนดของระบบหล่อลื่นและการบำรุงรักษา
ประสิทธิภาพในระยะยาวของไดรฟ์แกว่งแนวนอนถูกกำหนดโดยตรงจากคุณภาพและความสม่ำเสมอของโปรแกรมการหล่อลื่น จะต้องรักษาวงจรการหล่อลื่นสองวงจรแยกกัน: วงจรองค์ประกอบการหมุนของแหวนแกว่งและวงจรตาข่ายเฟืองตัวหนอน ซึ่งในการออกแบบส่วนใหญ่ใช้อ่างน้ำมันร่วมกันภายในตัวเรือน แต่อาจต้องใช้เกรดน้ำมันหล่อลื่นที่แตกต่างกันในการใช้งานที่มีประสิทธิภาพสูงหรืออุณหภูมิสูงมาก
โดยทั่วไปแล้ว ตาข่ายเฟืองตัวหนอนจะถูกหล่อลื่นโดยการสาดน้ำมันจากอ่างเก็บน้ำที่อยู่ด้านล่างของตัวเรือนจนถึงระดับที่ช่วยให้ส่วนล่างของฟันเฟืองของวงแหวนจุ่มลงในน้ำมันในระหว่างการหมุน โดยนำสารหล่อลื่นเข้าไปในบริเวณที่สัมผัสของตาข่าย สารหล่อลื่นที่แนะนำคือน้ำมันเกียร์ที่มีสารเติมแต่งแรงดันสูง (EP) ซึ่งจัดทำขึ้นสำหรับการใช้งานกับเฟืองตัวหนอน โดยมีเกรดความหนืด ISO VG 220 หรือ VG 460 ที่ได้รับการระบุโดยทั่วไปมากที่สุด ความเร็วในการเลื่อนสูงในการสัมผัสระหว่างหนอนกับล้อจะสร้างความร้อนที่ต้องจัดการโดยคุณลักษณะความหนืด-อุณหภูมิของน้ำมันหล่อลื่น และช่วงการเปลี่ยนถ่ายน้ำมันที่ 2,000 ถึง 4,000 ชั่วโมงการทำงาน เป็นเรื่องปกติสำหรับการขับเคลื่อนในการให้บริการกลางแจ้ง
องค์ประกอบการกลิ้งของแหวนแกว่งจำเป็นต้องมีการหล่อลื่นด้วยจาระบีผ่านหัวอัดจาระบีที่อยู่บนวงแหวนหรือตัวเรือน จาระบีจะต้องเจาะเข้าไปในร่องน้ำองค์ประกอบกลิ้งผ่านร่องกระจายจาระบีที่กลึงเข้าไปในวงแหวน ในการติดตั้งกลางแจ้ง ช่วงเวลาการอัดจาระบีควรสอดคล้องกับกำหนดการบำรุงรักษาของการใช้งาน โดยทั่วไปทุกๆ 6 ถึง 12 เดือนสำหรับการใช้งานติดตามแสงอาทิตย์ และบ่อยกว่านั้นสำหรับอุปกรณ์ก่อสร้างที่สัมผัสกับวงจรการซักและการปนเปื้อน
การใช้งานทั่วไปของไดรฟ์แกว่งแนวนอน
ลักษณะการออกแบบของตัวขับแกว่งแนวนอน — โครงสร้างแบบบูรณาการที่กะทัดรัด ความสามารถในการล็อคตัวเอง ความจุโมเมนต์การพลิกคว่ำที่สูง และการควบคุมการหมุนด้วยความเร็วต่ำ — ทำให้พวกมันเหมาะสมกับช่วงการใช้งานเฉพาะและกำหนดไว้อย่างดีซึ่งต้องใช้คุณสมบัติเหล่านี้พร้อมกัน
- เครื่องติดตามพลังงานแสงอาทิตย์: เครื่องติดตามแอซิมัทแกนเดี่ยวสำหรับโซลาร์ฟาร์มระดับสาธารณูปโภคใช้ไดรฟ์แกว่งแนวนอนเพื่อหมุนแผงอาร์เรย์รอบแกนแนวตั้ง ตามการเคลื่อนที่ของแอซิมัทของดวงอาทิตย์ตลอดทั้งวัน คุณลักษณะการล็อคตัวเองจะยึดตำแหน่งแผงได้อย่างแม่นยำในระหว่างการโหลดลมโดยไม่มีกำลังมอเตอร์ต่อเนื่อง ช่วยลดการใช้พลังงานและความซับซ้อนของระบบควบคุมได้อย่างมาก
- เครนเคลื่อนที่และตัวจัดการแบบยืดไสลด์: โครงสร้างการแกว่งส่วนบนของเครนเคลื่อนที่จะหมุนบนตัวขับแกว่งในแนวนอนซึ่งจะต้องรองรับโมเมนต์การพลิกคว่ำของบูมและน้ำหนักที่ยกได้ ในขณะเดียวกันก็ให้การหมุนที่ราบรื่นและควบคุมได้ระหว่างการแกว่ง ความสามารถในการรับโมเมนต์พลิกคว่ำที่สูงรวมกับการยึดโหลดแบบล็อคตัวเองมีความสำคัญอย่างยิ่งในการใช้งานนี้
- แท่นทำงานทางอากาศ (AWP) และรถกระเช้าบูม: แท่นหมุนที่ฐานของชุดบูมจะหมุนบนชุดขับเคลื่อนแบบแกว่งในแนวนอน โดยรองรับน้ำหนักทั้งหมดของบูมที่ขยายออก แท่นยก และผู้โดยสารในช่วงเวลาพลิกคว่ำ ซองขนาดกะทัดรัดภายในโครงสร้างฐานเครื่องจักรเป็นข้อกำหนดสำคัญที่ระบบขับเคลื่อนแกว่งในตัวตอบสนองได้อย่างมีประสิทธิภาพ
- เครื่องกำหนดตำแหน่งทางอุตสาหกรรมและแท่นหมุนสำหรับการเชื่อม: ไดรฟ์แกว่งแนวนอน rotate workpieces around a vertical axis for welding, inspection, or assembly operations, providing precise angular positioning under substantial workpiece weight. The combination of high axial load capacity and accurate positioning from the worm gear mesh makes them well-matched to this application class.
- เสาอากาศสื่อสารผ่านดาวเทียม: เสาอากาศติดตามภาคพื้นดินใช้ไดรฟ์แกว่งแนวนอนสำหรับการหมุนแอซิมัท ซึ่งจำเป็นต้องมีการวางตำแหน่งที่แม่นยำและลดการฟันเฟืองเพื่อรักษาแนวลำแสงเสาอากาศกับดาวเทียมที่กำลังเคลื่อนที่ โปรไฟล์ตัวหนอนกราวด์ที่มีความแม่นยำและแบริ่งเพลาตัวหนอนแบบโหลดล่วงหน้าได้รับการระบุในการใช้งานเหล่านี้เพื่อลดข้อผิดพลาดในการวางตำแหน่งเชิงมุมให้เหลือน้อยที่สุด

บริษัท Transmission Technology Jiangsu Manchen, Ltd. เก่งในการสร้างตลับลูกปืนที่กำหนดเองเชื่อถือได้และแม่นยำสำหรับอุตสาหกรรมที่หลากหลายสร้างสรรค์สิ่งใหม่ ๆ อย่างต่อเนื่องเพื่อให้ได้มาตรฐานสูงสุดและแสวงหาโอกาสการทำงานร่วมกัน ซัพพลายเออร์แบริ่งที่น่าเชื่อถือและมั่นคงในประเทศจีน
ติดต่อเรา
-
Address:ฉบับที่ 8, ถนน Nanqiu, เมือง Huangtu, Jiangyin City, China
-
Tel:+86-13646122221
-
E-mail:
-
E-mail:ma@slewingbearingcn.com
