
ข่าว

คุณจะเลือกไดรฟ์แกว่งแนวนอนที่เหมาะสมสำหรับการใช้งานของคุณได้อย่างไร?
 2026.05.13
2026.05.13
 ข่าวอุตสาหกรรม
ข่าวอุตสาหกรรม
การเลือกไดรฟ์แกว่งแนวนอนที่เหมาะสมเป็นหนึ่งในการตัดสินใจที่ดูตรงไปตรงมาเมื่อมองจากพื้นผิว แต่เผยให้เห็นความซับซ้อนหลายชั้นอย่างรวดเร็วเมื่อคุณเจาะลึกข้อกำหนดการใช้งาน ตัวเลือกที่ไม่ดีไม่เพียงแต่มีประสิทธิภาพต่ำกว่าเท่านั้น แต่ยังทำงานล้มเหลวก่อนเวลาอันควร สร้างภาระในการบำรุงรักษา และในระบบที่มีความสำคัญด้านความปลอดภัยอาจทำให้เกิดการหยุดทำงานหรืออุบัติเหตุที่มีค่าใช้จ่ายสูง คู่มือนี้จะอธิบายตัวแปรการเลือกที่มีความหมายทุกรายการ เพื่อให้วิศวกรและผู้เชี่ยวชาญด้านการจัดซื้อมีกรอบการทำงานที่เป็นประโยชน์สำหรับการโทรที่ถูกต้องในครั้งแรก
ไดรฟ์แกว่งแนวนอนทำอะไรได้จริง
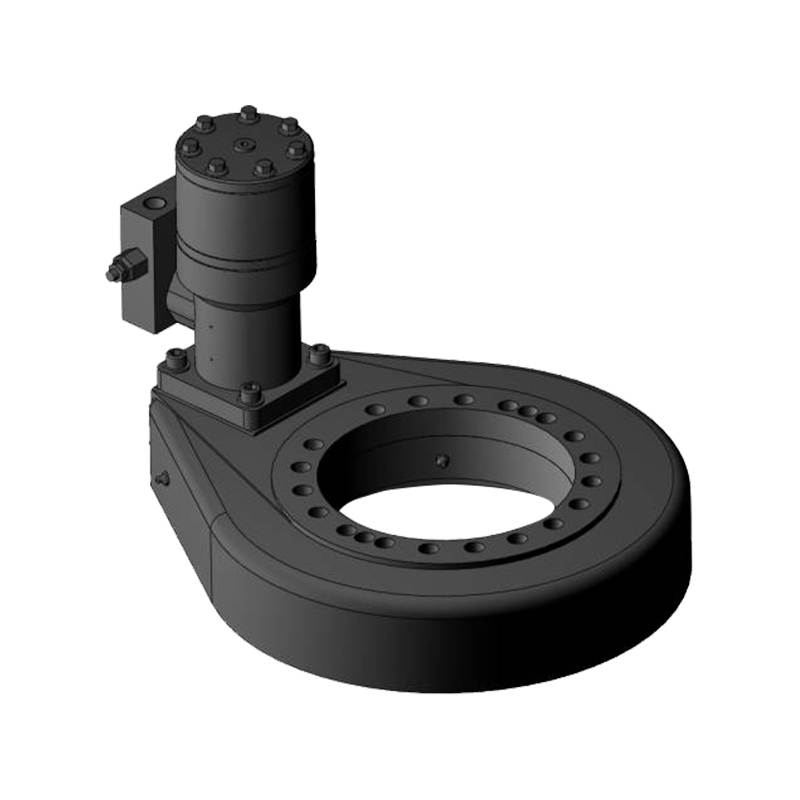
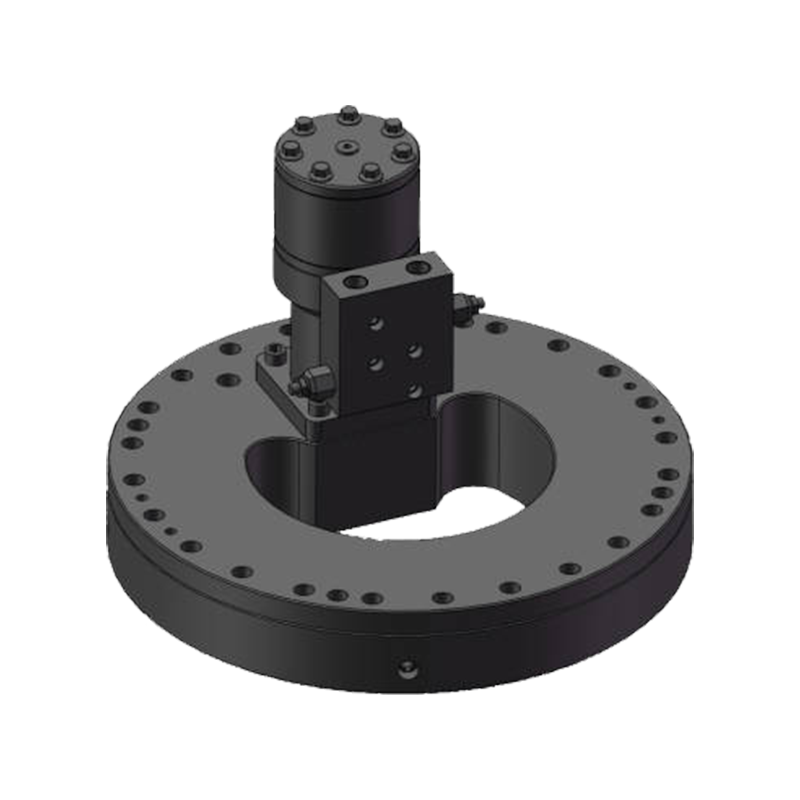
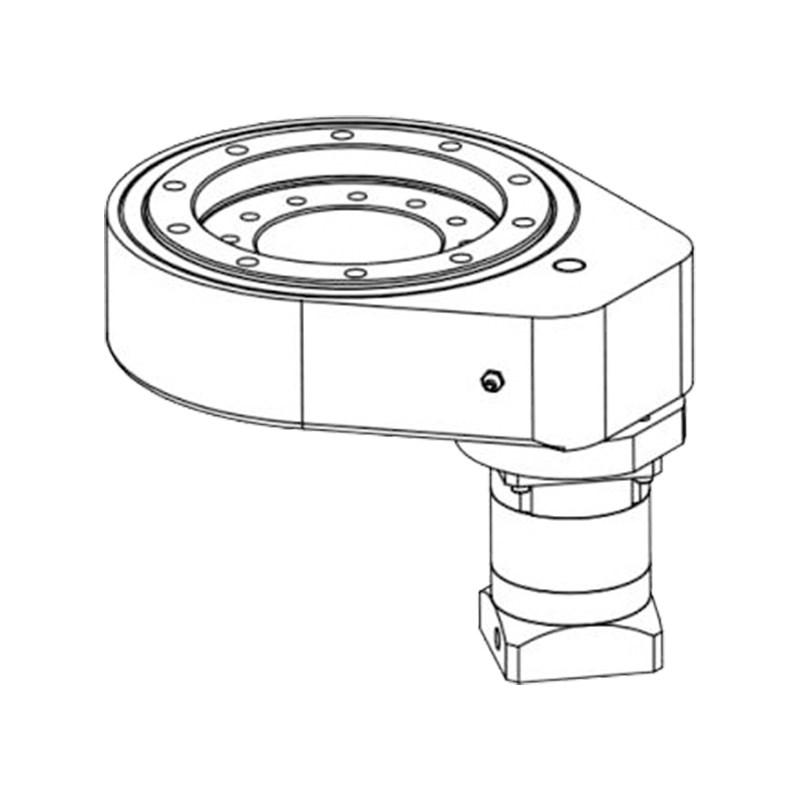
ตัวขับแกว่งแนวนอนคือตัวกระตุ้นโรตารีแบบปิดที่รวมกลไกลดเฟืองตัวหนอนเข้ากับลูกปืนแหวนแกว่งในตัวเครื่องแบบรวมตัวเดียว วงแหวนแกว่งจะจัดการกับแรงในแนวรัศมี แนวแกน และโมเมนต์ที่กำหนดโดยโครงสร้างการหมุนด้านบน ในขณะที่เฟืองตัวหนอนให้ข้อได้เปรียบทางกลที่จำเป็นในการขับเคลื่อนการหมุนนั้นด้วยอินพุตมอเตอร์ที่ค่อนข้างเล็ก "แนวนอน" หมายถึงการวางแนวของแกนเอาท์พุตของไดรฟ์ — การหมุนเกิดขึ้นรอบแกนแนวตั้ง ทำให้เป็นทางเลือกที่เป็นธรรมชาติสำหรับการใช้งานที่โครงสร้างต้องแกว่ง แพน หรือหมุนอย่างต่อเนื่องในระนาบแนวนอน
แตกต่างจากแหวนแกว่งแบบสแตนด์อโลนที่จับคู่กับกระปุกเกียร์ภายนอก ตัวขับแกว่งแนวนอนแบบรวมทำให้การติดตั้งง่ายขึ้น ปรับปรุงความสมบูรณ์ของการปิดผนึก และลดความพยายามทางวิศวกรรมที่จำเป็นในการออกแบบโครงสร้างโดยรอบ การบูรณาการนี้เป็นเหตุว่าทำไมจึงครองการใช้งานต่างๆ เช่น เครื่องติดตามพลังงานแสงอาทิตย์ โต๊ะหมุนของเครน แพลตฟอร์มการทำงานทางอากาศ ระบบการหันเหของกังหันลม และเครื่องกำหนดตำแหน่งเสาอากาศดาวเทียม ทุกที่ที่ต้องการการสั่งงานแบบหมุนขนาดกะทัดรัดในตัวเองพร้อมความสามารถในการรับน้ำหนักสูง
การวิเคราะห์ภาระ: จุดเริ่มต้นที่ไม่สามารถต่อรองได้
การเลือกไดรฟ์แกว่งแนวนอนทุกครั้งจะเริ่มต้นด้วยการวิเคราะห์โหลดที่สมบูรณ์ การข้ามหรือประมาณขั้นตอนนี้เป็นสาเหตุเดียวที่ทำให้เกิดความล้มเหลวก่อนวัยอันควร โหลดมีสามประเภทที่ไดรฟ์ต้องจัดการพร้อมกัน และทั้งสามประเภทจะต้องได้รับการวัดปริมาณก่อนที่จะเริ่มการเปรียบเทียบแค็ตตาล็อก
โหลดตามแนวแกน
โหลดตามแนวแกนทำหน้าที่ขนานกับแกนเอาท์พุตของตัวขับเคลื่อน — ในไดรฟ์แบบแกว่งแนวนอน โดยทั่วไปจะเป็นน้ำหนักที่ตายแล้วของโครงสร้างที่หมุนด้านบน แผงโซลาร์เซลล์ โครงสร้างส่วนบนของโต๊ะหมุนของเครน หรือชุดเสาอากาศ ล้วนทำให้น้ำหนักลดลงผ่านทางไดรฟ์ นี่เป็นภาระที่ตรงไปตรงมาที่สุดในการคำนวณ โดยพื้นฐานแล้วคือมวลรวมของทุกสิ่งที่หมุนอยู่เหนือตัวขับ คูณด้วยความเร่งโน้มถ่วง และแสดงเป็นกิโลนิวตัน
โหลดเรเดียล
โหลดในแนวรัศมีจะตั้งฉากกับแกนเอาท์พุต — ในแนวนอน ในกรณีของตัวขับเคลื่อนแบบแกว่งในแนวนอน แรงดันลมบนแผงหรือเสาอากาศขนาดใหญ่เป็นสาเหตุของภาระในแนวรัศมีที่พบบ่อยที่สุดในการใช้งานกลางแจ้ง การโหลดเยื้องศูนย์ที่เกิดจากจุดศูนย์ถ่วงนอกศูนย์ในชุดประกอบที่กำลังหมุนก็มีส่วนทำให้ส่วนประกอบในแนวรัศมีเช่นกัน โหลดในแนวรัศมีมักจะเป็นแบบไดนามิกและแปรผันตามทิศทาง ซึ่งทำให้การประมาณค่าสูงสุดมีความสำคัญมากกว่าการคำนวณค่าเฉลี่ย
พลิกคว่ำช่วงเวลา
โมเมนต์การพลิกกลับคือภาระการดัดงอที่พยายามเอียงโครงสร้างที่กำลังหมุนโดยสัมพันธ์กับตัวเรือนไดรฟ์ จะถูกสร้างขึ้นเมื่อใดก็ตามที่จุดศูนย์ถ่วงของชุดประกอบที่กำลังหมุนไม่ได้อยู่เหนือเส้นศูนย์กลางการหมุนของชุดขับเคลื่อนโดยตรง หรือเมื่อแรงในแนวนอน (เช่น ลม) กระทำที่ความสูงเหนือระนาบการติดตั้งชุดขับเคลื่อน โมเมนต์การพลิกคว่ำแสดงเป็นกิโลนิวตัน-เมตร และมักเป็นพารามิเตอร์โหลดที่มีความต้องการมากที่สุด — ไดรฟ์จำนวนมากที่ผ่านการตรวจสอบโหลดแนวแกนและแนวรัศมีล้มเหลวในความจุโมเมนต์การพลิกคว่ำ
ข้อกำหนดแรงบิดและขนาดมอเตอร์
เมื่อสร้างโหลดแล้ว จะต้องคำนวณแรงบิดเอาท์พุตที่ต้องการ นี่คือแรงบิดที่ต้องการที่วงแหวนเอาท์พุตของไดรฟ์เพื่อเอาชนะแรงต้านทานทั้งหมด และเร่งความเร็วโหลดให้ได้ตามความเร็วการหมุนที่ต้องการภายในระยะเวลาที่ยอมรับได้ ปัจจัยหลักที่ทำให้เกิดแรงบิดที่ต้องการ ได้แก่ แรงเสียดทานภายในแบริ่งแหวนแกว่ง (ซึ่งเพิ่มขึ้นตามแรงตามแนวแกนและโมเมนต์การพลิกคว่ำ) การลากตามหลักอากาศพลศาสตร์บนโครงสร้างที่กำลังหมุน และแรงบิดเฉื่อยที่จำเป็นในระหว่างขั้นตอนการเร่งความเร็ว
ไดรฟ์แกว่งแนวนอน ถูกระบุโดยพิกัดแรงบิดจับยึดและแรงบิดใช้งานพิกัด ซึ่งตัวเลขเหล่านี้ไม่เหมือนกัน แรงบิดในการยึดคือโหลดคงที่สูงสุดที่ชุดขับเคลื่อนสามารถรับได้โดยไม่ต้องหมุน แรงบิดในการทำงานคือแรงบิดต่อเนื่องที่มีอยู่ระหว่างการทำงาน คุณลักษณะการล็อคตัวเองของเฟืองตัวหนอน (ปรากฏเมื่อมุมนำอยู่ต่ำกว่ามุมเสียดสี โดยทั่วไปเมื่ออัตราทดเกียร์เกินประมาณ 20:1) หมายความว่าตัวขับเคลื่อนแบบแกว่งแนวนอนจำนวนมากสามารถรักษาตำแหน่งของตนไว้ภายใต้ภาระโดยไม่ต้องเบรกแยกต่างหาก ซึ่งเป็นคุณลักษณะที่ทำให้การออกแบบระบบง่ายขึ้นในการใช้งาน เช่น เครื่องติดตามแสงอาทิตย์ โดยที่ตัวขับเคลื่อนจะต้องยึดมุมแผงต้านภาระลมโดยไม่มีการจ่ายไฟของมอเตอร์อย่างต่อเนื่อง
การเลือกมอเตอร์ตามแรงบิดอินพุตที่ต้องการ (แรงบิดเอาท์พุตหารด้วยอัตราทดเกียร์ ปรับตามประสิทธิภาพของไดรฟ์) และความเร็วอินพุตที่ต้องการ (ความเร็วในการหมุนเอาท์พุตคูณด้วยอัตราทดเกียร์) ไดรฟ์แกว่งแนวนอนส่วนใหญ่ยอมรับมอเตอร์เฟรม IEC หรือ NEMA มาตรฐาน และหลายตัวมาพร้อมกับมอเตอร์พร้อมหน้าแปลนติดตั้งมอเตอร์แบบกลึง
เปรียบเทียบพารามิเตอร์การเลือกคีย์
| พารามิเตอร์ | สิ่งที่ต้องพิจารณา | ช่วงทั่วไป | ความเสี่ยงในการคัดเลือกหากไม่ระบุ |
| โหลดตามแนวแกน Capacity | มวลหมุนรวม × แรงโน้มถ่วง | 5 กิโลนิวตัน – 2,000 กิโลนิวตัน | แบริ่งแมพการแข่งขัน, การจับกุม |
| พลิกคว่ำช่วงเวลา | โหลดนอกรีต × แขนโมเมนต์ | 0.5 กิโลนิวตัน – 500 กิโลนิวตันเมตร | ฟันริงเกียร์เสีย เอียง |
| แรงบิดในการทำงาน | แรงเสียดทานแรงเฉื่อยแรงเฉื่อยแรงบิด | 0.5 กิโลนิวตัน – 200 กิโลนิวตันเมตร | มอเตอร์โอเวอร์โหลด การสึกหรอของเฟืองตัวหนอน |
| ความเร็วเอาต์พุต | อัตราสลูว์ที่ต้องการ (°/นาที หรือ รอบต่อนาที) | 0.01 – 10 รอบต่อนาที | ข้อผิดพลาดในการวางตำแหน่ง ความร้อนเกิน |
| อัตราทดเกียร์ | ความต้องการล็อคตัวเองเทียบกับประสิทธิภาพ | 20:1 – 100:1 | การขับขี่ถอยหลัง ความต้องการเบรก |
ข้อพิจารณาด้านสิ่งแวดล้อมและวัฏจักรหน้าที่
ไดรฟ์ที่ตรงตามข้อกำหนดการรับน้ำหนักทางกลบนกระดาษยังสามารถทำงานล้มเหลวได้ก่อนกำหนดหากข้อกำหนดด้านสิ่งแวดล้อมไม่ถูกต้อง ไดรฟ์แกว่งแนวนอนมีการใช้งานกันอย่างแพร่หลายกลางแจ้ง มักจะอยู่ในสภาวะที่ไม่เอื้ออำนวย และตัวเรือน การปิดผนึก และการรักษาพื้นผิวจะต้องสอดคล้องกับสภาพแวดล้อมการทำงาน
- ระดับ IP: สำหรับการใช้งานกลางแจ้ง โดยทั่วไปต้องมี IP65 ขั้นต่ำเพื่อแยกฝุ่นและละอองน้ำ สภาพแวดล้อมทางทะเลหรือชายฝั่งต้องการ IP67 หรือสูงกว่า พร้อมตัวยึดที่ทำจากสแตนเลสและการป้องกันการกัดกร่อนเพิ่มเติมบนพื้นผิวที่สัมผัส ยืนยันว่าพิกัด IP ใช้กับไดรฟ์ที่ประกอบเสร็จแล้วรวมถึงอินเทอร์เฟซของมอเตอร์ด้วย — ไดรฟ์บางตัวมีพิกัด IP65 ที่ตัวเครื่อง แต่มีหน้าติดตั้งมอเตอร์ที่ไม่มีการป้องกันซึ่งกลายเป็นจุดทางเข้า
- ช่วงอุณหภูมิ: สารหล่อลื่นมาตรฐานทำงานได้ดีในช่วงอุณหภูมิ -20°C ถึง 80°C การใช้งานในสภาพแวดล้อมอาร์กติก การติดตั้งในทะเลทราย หรือใกล้แหล่งความร้อนทางอุตสาหกรรม ต้องใช้จาระบีอุณหภูมิต่ำหรืออุณหภูมิสูงที่ระบุ ยืนยันข้อกำหนดน้ำมันหล่อลื่นของผู้ผลิตไดรฟ์และช่วงอุณหภูมิที่ครอบคลุมก่อนที่จะสรุปการเลือกสำหรับการใช้งานในสภาพอากาศที่รุนแรง
- รอบการทำงาน: ไดรฟ์แกว่งแนวนอน in solar tracking applications typically operate intermittently — a brief movement every few minutes — placing low thermal demands on the worm gear assembly. Drives used in continuous-rotation applications such as antenna positioners or turntables face much higher thermal loads and require duty cycle ratings (expressed as operating time percentage) that match the application. Exceeding the duty cycle rating leads to lubricant degradation and accelerated worm gear wear.
- การป้องกันการกัดกร่อน: ไดรฟ์มาตรฐานใช้โครงเหล็กเคลือบซิงค์ฟอสเฟตและทาสีเพียงพอสำหรับสภาพแวดล้อมภายใน การติดตั้งชายฝั่งและนอกชายฝั่งจำเป็นต้องใช้ตัวเรือนชุบสังกะสีแบบจุ่มร้อน วงแหวนสเตนเลสสตีล หรือพื้นผิวเคลือบอีพ็อกซี่ ขึ้นอยู่กับประเภทการกัดกร่อนของไซต์งาน
การกำหนดค่าการติดตั้งและเรขาคณิตอินเทอร์เฟซ
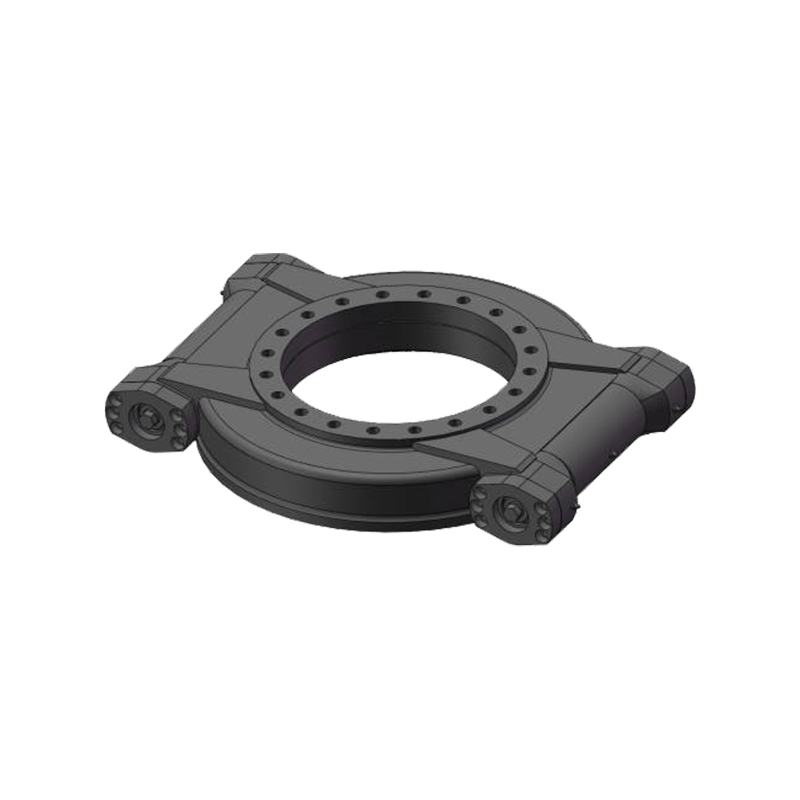
การรวมทางกายภาพของตัวขับแกว่งเข้ากับโครงสร้างโดยรอบเป็นข้อจำกัดในทางปฏิบัติที่ต้องแก้ไขในระหว่างการเลือก ไม่ใช่ระหว่างการติดตั้ง ระบบขับเคลื่อนการแกว่งแนวนอนมีให้เลือกใช้งานโดยมีการกำหนดค่าวงแหวนเอาท์พุตที่แตกต่างกัน — เฟืองภายนอก (ฟันที่ด้านนอกของวงแหวนเอาท์พุต), เฟืองภายใน (ฟันที่ด้านใน) และแบบไร้ฟัน (ขับเคลื่อนด้วยแรงเสียดทานหรือการเชื่อมต่อโดยตรง) — แต่ละตัวเหมาะกับการจัดการจลนศาสตร์ที่แตกต่างกัน วงแหวนเอาท์พุตเกียร์ภายนอกนั้นพบได้บ่อยที่สุด และปล่อยให้เพลาหนอนอยู่นอกเส้นผ่านศูนย์กลางวงแหวน ทำให้มอเตอร์และกระปุกเกียร์สามารถเข้าถึงได้เพื่อการบำรุงรักษา การกำหนดค่าเกียร์ภายในจะใช้เมื่อต้องรวมไดรฟ์เข้ากับชุดประกอบแบบหมุนขนาดกะทัดรัด
ขนาดวงกลมโบลต์บนทั้งตัวเรือนคงที่และวงแหวนเอาท์พุตที่กำลังหมุนต้องได้รับการตรวจสอบเทียบกับโครงสร้างการผสมพันธุ์ ผู้ผลิตหลายรายเสนอรูปแบบโบลต์ที่ปรับแต่งเอง หน้าแปลนยึด และส่วนต่อประสานเพลาเอาท์พุตเป็นตัวเลือกมาตรฐาน การระบุสิ่งเหล่านี้ในขั้นตอนการสั่งซื้อจะมีราคาถูกกว่าอะแดปเตอร์การตัดเฉือนในภาคสนามมาก ตรวจสอบเส้นผ่านศูนย์กลางรูทะลุด้วยหากสายเคเบิล สายไฮดรอลิก หรือท่อนิวแมติกต้องผ่านศูนย์กลางของตัวขับเคลื่อน — ตัวขับเคลื่อนแบบแกว่งแนวนอนบางรุ่นเท่านั้นที่มีรูตรงกลาง และไม่สามารถติดตั้งคุณสมบัตินี้เพิ่มได้

ปัจจัยด้านความปลอดภัยและความคาดหวังอายุการใช้งาน
โดยทั่วไปการให้คะแนนโหลดที่เผยแพร่สำหรับไดรฟ์แกว่งแนวนอนจะขึ้นอยู่กับภาระการพิสูจน์คงที่หรือการคำนวณอายุความล้าแบบไดนามิก และการใช้ปัจจัยด้านความปลอดภัยที่เหมาะสมเหนือภาระการทำงานที่คำนวณได้ถือเป็นแนวปฏิบัติทางวิศวกรรมมาตรฐาน สำหรับการใช้งานที่ไม่มีความสำคัญด้านความปลอดภัยส่วนใหญ่ ปัจจัยด้านความปลอดภัย 1.5× ถึง 2× สำหรับแรงบิดในการทำงานและความสามารถในการรับน้ำหนักมีความเหมาะสม สำหรับการใช้งานที่ความล้มเหลวของไดรฟ์ก่อให้เกิดความเสี่ยงต่อบุคลากร เช่น แพลตฟอร์มการทำงานทางอากาศ อุปกรณ์กำหนดตำแหน่งทางการแพทย์ หรือเครนติดยานพาหนะ อาจระบุปัจจัยด้านความปลอดภัย 3 เท่าหรือสูงกว่าได้ และควรได้รับการยืนยันจากผู้ผลิตไดรฟ์เพื่อยืนยันการรับรองมาตรฐานความปลอดภัยของเครื่องจักรที่เกี่ยวข้อง (เช่น EN 13000 สำหรับเครนหรือ ISO 11684 สำหรับอุปกรณ์การเกษตร)
ควรหารือเกี่ยวกับอายุการใช้งานที่คาดหวังในแง่ของอายุตลับลูกปืน L10 (จำนวนชั่วโมงการทำงานที่คาดว่า 10% ของจำนวนประชากรของไดรฟ์ที่เหมือนกันจะแสดงให้เห็นถึงความล้มเหลวของความล้าของตลับลูกปืน) และอายุความล้าของพื้นผิวเฟืองตัวหนอน สำหรับการใช้งานการติดตามพลังงานแสงอาทิตย์ อายุการใช้งานการออกแบบ 25 ปีถือเป็นบรรทัดฐานของอุตสาหกรรม ยืนยันว่าการคำนวณอายุการใช้งาน L10 ของผู้ผลิตนั้นอิงตามโปรไฟล์ภาระการทำงานจริงของการใช้งาน ไม่ใช่เงื่อนไขอ้างอิงทั่วไป
รายการตรวจสอบการปฏิบัติก่อนที่จะสรุปการเลือกของคุณ
- ยืนยันโหลดตามแนวแกน โหลดในแนวรัศมีสูงสุด และโมเมนต์การพลิกคว่ำสูงสุดภายใต้สภาวะกรณีที่เลวร้ายที่สุด (โดยทั่วไปคือความเร็วลมสูงสุดรวมกับโหลดเยื้องศูนย์สูงสุด)
- ตรวจสอบว่าแรงบิดในการทำงานที่กำหนดของไดรฟ์ที่เลือกนั้นเกินแรงบิดเอาท์พุตที่ต้องการที่คำนวณไว้ตามปัจจัยด้านความปลอดภัยที่เลือก
- ตรวจสอบอัตราทดเกียร์สำหรับการล็อคตัวเองหากจำเป็นต้องรักษาตำแหน่งแบบพาสซีฟ หรือยืนยันข้อมูลจำเพาะของเบรก หากไม่เป็นเช่นนั้น
- ยืนยันว่าระดับ IP ช่วงอุณหภูมิ และการป้องกันการกัดกร่อนตรงกับสภาพแวดล้อมการติดตั้ง
- ตรวจสอบขนาดวงกลมโบลต์ การกำหนดค่าวงแหวนเอาท์พุต และข้อกำหนดของรูตรงกลางเทียบกับการออกแบบโครงสร้างการผสมพันธุ์
- ขอการคำนวณอายุการใช้งานตลับลูกปืน L10 ตามโปรไฟล์การรับน้ำหนักการใช้งานจริง ไม่ใช่เงื่อนไขการอ้างอิงในแคตตาล็อก
- ยืนยันความเข้ากันได้ของอินเทอร์เฟซมอเตอร์ — ขนาดเฟรม เส้นผ่านศูนย์กลางเพลา และมาตรฐานหน้าแปลนยึด (IEC หรือ NEMA)
- ตรวจสอบข้อกำหนดการหล่อลื่นและช่วงเวลาการอัดจาระบีใหม่โดยเทียบกับกำหนดการบำรุงรักษาที่วางแผนไว้
การเลือกไดรฟ์แกว่งแนวนอนให้รางวัลการวิเคราะห์ตามระเบียบวิธี ตัวไดรฟ์นั้นเป็นส่วนประกอบที่แข็งแกร่งและผ่านการพิสูจน์แล้ว ความล้มเหลวที่เกิดขึ้นในภาคสนามมักจะติดตามได้จากพารามิเตอร์โหลดที่ไม่ระบุ ระดับสภาพแวดล้อมที่ไม่ตรงกัน หรือข้อจำกัดของอินเทอร์เฟซที่ถูกมองข้าม ทำงานผ่านตัวแปรแต่ละตัวข้างต้นอย่างเป็นระบบ ติดต่อฝ่ายสนับสนุนด้านวิศวกรรมของผู้ผลิตเมื่อสภาพการใช้งานไม่ปกติ และผลลัพธ์ที่ได้คือไดรฟ์ที่ทำงานได้อย่างน่าเชื่อถือตลอดอายุการใช้งานตามตั้งใจของระบบที่ขับเคลื่อนอยู่

บริษัท Transmission Technology Jiangsu Manchen, Ltd. เก่งในการสร้างตลับลูกปืนที่กำหนดเองเชื่อถือได้และแม่นยำสำหรับอุตสาหกรรมที่หลากหลายสร้างสรรค์สิ่งใหม่ ๆ อย่างต่อเนื่องเพื่อให้ได้มาตรฐานสูงสุดและแสวงหาโอกาสการทำงานร่วมกัน ซัพพลายเออร์แบริ่งที่น่าเชื่อถือและมั่นคงในประเทศจีน
ติดต่อเรา
-
Address:ฉบับที่ 8, ถนน Nanqiu, เมือง Huangtu, Jiangyin City, China
-
Tel:+86-13646122221
-
E-mail:
-
E-mail:ma@slewingbearingcn.com
